Un exoesqueleto es una estructura externa para ser
usada sobre el cuerpo de una persona con el objetivo de potenciar o apoyar sus
capacidades de movimiento. Que puede ser de dos tipos: pasivo, porque no requiere de actuadores externos (por ejemplo
soportes ortopédicos, muletas o un simple bastón); o exoesqueleto activo, en que el movimiento tiene que ser generado
por algún tipo de actuador sea
hidráulico, neumático o eléctrico (como un motor).
Por su disponibilidad, controlabilidad y gran cantidad de información, los motores eléctricos son los actuadores
más utilizados para producir movimiento en articulaciones de un exoesqueleto mecánico solidarias a las
correspondientes de un usuario humano. El
objetivo por tanto es lograr que el motor “imite”
el movimiento rotacional de la articulación humana (rodilla de una pierna o codo
de un brazo por ejemplo). Esto significa reproducir el movimiento en términos cinemáticos y dinámicos (posición, velocidad y aceleración angular; así como el momento
de torsión que los generaría).
Un primer problema a resolver apunta al sistema encargado de controlar el motor para proporcionar la posición, velocidad y posiblemente una aceleración deseada. Teniendo en mente que un motor
eléctrico (inicialmente de corriente continua o DC) es un sistemaelectromecánico que puede considerarse como una “fuente ideal” de velocidad angular. Y para devolver cualquiera de las variables
cinemáticas requerirá de un control externo que por lo general se implementa por medio de un sistema electrónico.
Perspectiva Tele-manipulador.
Las aplicaciones de un exoesqueleto son diversas. Algunas veces se usan para incrementar
la capacidad física y potencia de un operario, y otras para rehabilitación o
asistencia del mismo. En cualquier caso, la clave es cómo el operario va a controlarlo y “gobernarlo”. Tomando en
cuenta el control, un exoesqueleto activo seria similar a un robot donde el operador (una persona) se
encuentra dentro del mismo robot y por tanto es parte del lazo de control. “El propósito es hacer
que el sistema acoplado Humano-Maquina trabaje coordinadamente”.
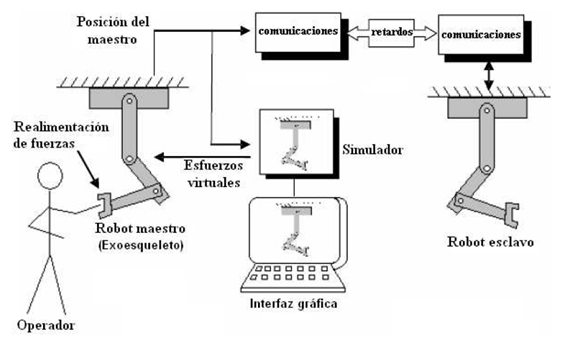
Un primer enfoque es considerar el exoesqueleto como un Tele-manipulador (control conocido como Maestro-Esclavo) generalmente utilizado
para operar robots a distancia de forma remota. El objetivo es hacer que la
maquina a distancia imite las
acciones del operador (fig1):
En
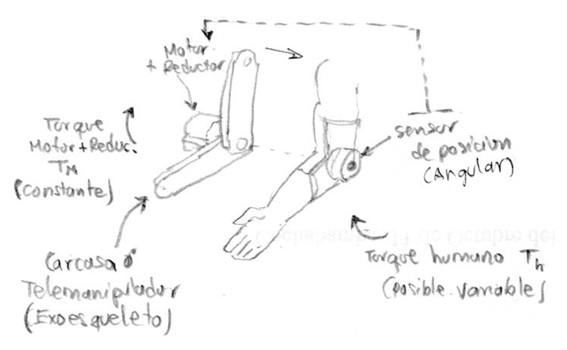
este sentido se puede ver al exoesqueleto como la combinación de dos partes.
Una estructura interna, equipado con todos los sensores e instrumentos de
medición que correspondería al “maestro” controlado por el operador (humano)
que envía los comandos al exoesqueleto externo que funciona como el “esclavo” (fig2).
De esta manera el exoesqueleto propuesto
correspondería a uno del tipo “amplificador
de potencia” que permitiría aumentar la capacidad física del operador adicionándole
la potencia de la maquina en forma coordinada para por ejemplo levantar una
carga o un peso.
La idea finalmente
se puede traducir en lo que se denominaría un “Amplificador de torque”: un sistema Mecatrónico cuyo corazón es el circuitoElectrónico analógico o digital para
implementar la lógica de control correspondiente. Sistema en actual desarrollo por el presente proyecto.